Task and Motion Planning of Multi-Limbed Legged Robot - 2 Emre Cemal Gönen 0:18 3 years ago 659 Далее Скачать
Optimization Based Motion Planning for Multi-Limbed Vertical Climbing Robots-BestPaperAward IROS2019 RoMeLa 1:25 5 years ago 20 184 Далее Скачать
Task and Motion Planning of Multi-Limbed Legged Robot Emre Cemal Gönen 0:14 4 years ago 445 Далее Скачать
General Task and Motion Planning with Multiple Manipulators robotiCS 0:16 3 years ago 252 Далее Скачать
RAMP: Reaction-Aware Motion Planning of Multi-Legged Robots for Locomotion in Microgravity Space Robotics Lab 3:00 1 year ago 379 Далее Скачать
IROS20 [presentation]: Kinodynamic Motion Planning for Multi-Legged Robot Yanran Ding 7:15 4 years ago 1 277 Далее Скачать
Versatile Multi-Contact Planning and Control for Legged Loco-Manipulation Robotic Systems Lab: Legged Robotics at ETH Zürich 5:53 1 year ago 10 787 Далее Скачать
Lecture 22: MIT 6.800/6.843 Robotics Manipulation (Fall 2021) | "Task and Motion Planning" underactuated 1:17:25 Streamed 3 years ago 3 421 Далее Скачать
Multi-Contact Task and Motion Planning Guided by Video Demonstration Kateryna Zorina 5:53 1 year ago 310 Далее Скачать
Fall 2022 6.4210/2 Lecture 21: Task and Motion Planning underactuated 1:24:53 Streamed 2 years ago 2 443 Далее Скачать
Fast Global Motion Planning for Dynamic Legged Robots Robomechanics Lab 0:59 4 years ago 741 Далее Скачать
SCALABLE TASK AND MOTION PLANNING FOR MULTI-ROBOT SYSTEMS IN OBSTACLE-RICH ENVIRONMENTS USC Information Sciences Institute 54:43 4 years ago 51 Далее Скачать
Optimization Based Motion Planning for Multi-Limbed Vertical Climbing Robots Xuan Lin 1:25 3 years ago 95 Далее Скачать
TRX'22 - Prof. Sarah Keren, "Task & Team Aware Motion Planning" Technion Robotics Initiative 16:03 2 years ago 70 Далее Скачать
RA-L & IROS 2020 Presentation: Risk-Aware Motion Planning for Limbed Robots Using NLP and GP Yuki Shirai 14:50 4 years ago 907 Далее Скачать
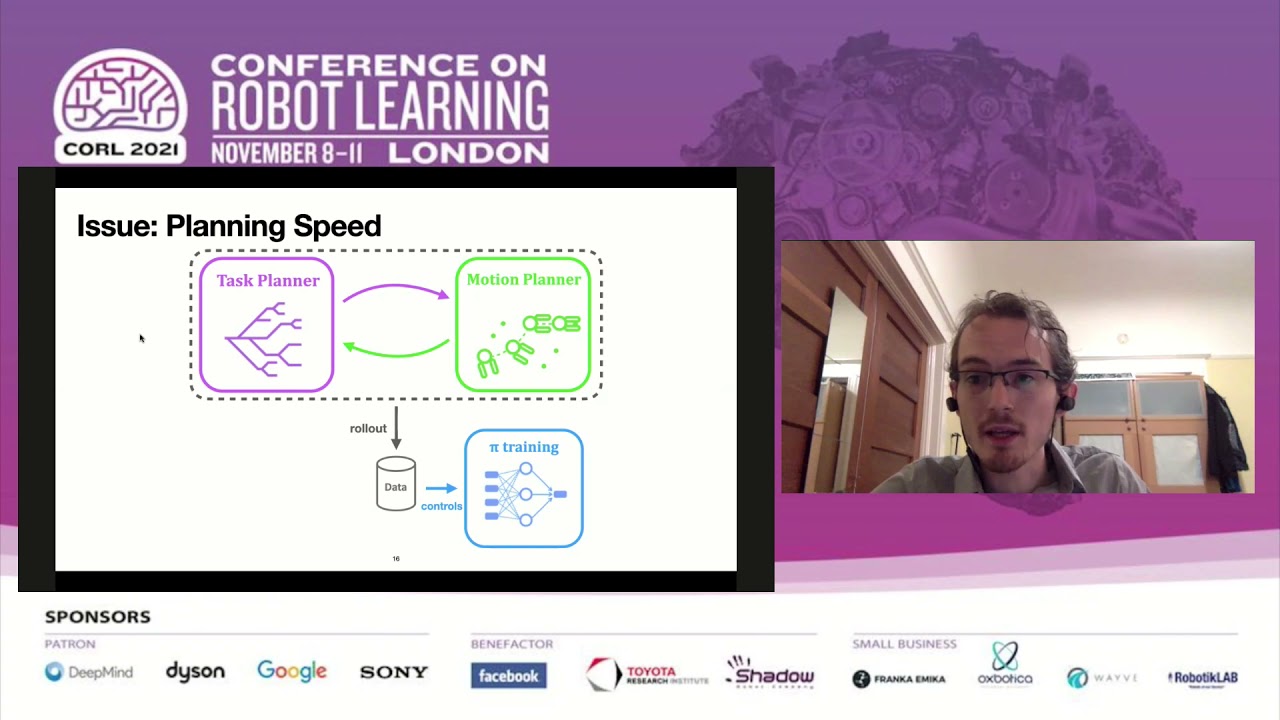
Guided Imitation of Task and Motion Planning by Michael James McDonald, Dylan Hadfield Menell Conference on Robot Learning 13:58 3 years ago 654 Далее Скачать
Differentiable Task Assignment and Motion Planning - Supplementary Computational Robotics Lab 4:52 1 year ago 596 Далее Скачать